近日,威尼斯官网机电工程学院“智能传感与集成化检测系统”团队在国际顶级学术期刊Chemical Engineering Journal(IF=16.744)上发表了题为“Inchworm-Inspired Soft Robot with Magnetic Driving Based on NdFeB, EGaIn and PDMS (PEN) Combination”(DOI:10.1016/j.cej.2023.142994)的研究论文。团队负责人关炎芳、2020级硕士研究生刘彦胜为共同第一作者,吴兰为共同通讯作者,9499www威尼斯为论文第一署名和通讯作者单位。
部分成果内容
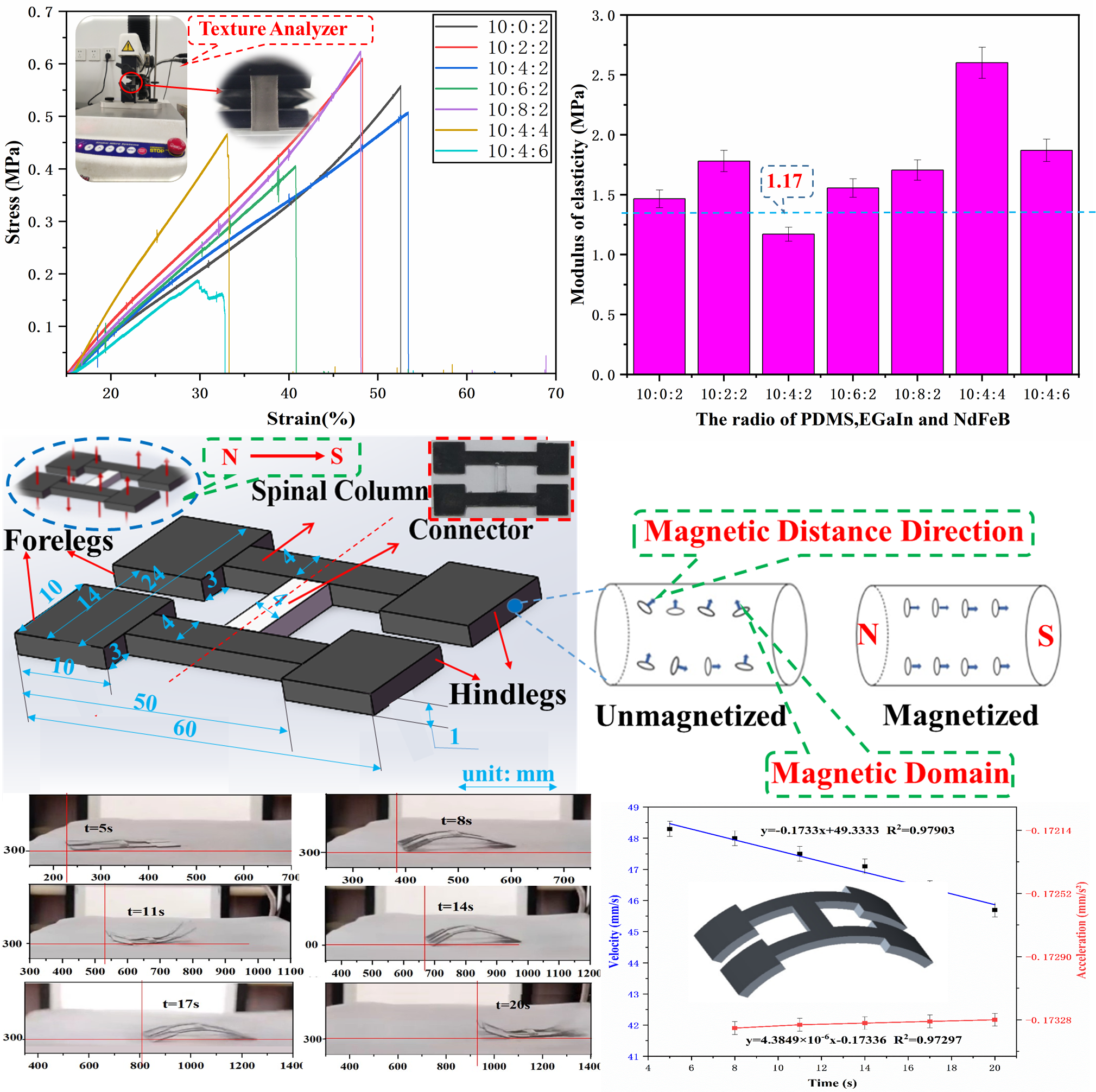
针对软体机器人应用中存在的柔韧性差、力学性能不高、可靠性低等问题,本论文以柔韧性好、流动性强、化学性质稳定和可拉伸的共晶稼铟(Eutectic gallium indium,EGaIn)液态金属作为功能材料,通过填充超强磁性和高导热性的钕铁硼纳米颗粒(Neodymium iron boron,NdFeB),并与具有良好生物相容性的聚二甲基硅氧烷(Polydimethylsiloxane,PDMS)相融合,制备出具有抗撕裂能强、弹性模量低、溶胀度小的仿尺蠖软体机器人。实验表明,液态金属共晶镓铟和钕铁硼的加入,降低复合材料的热膨胀系数,提高其热稳定性和耐酸碱腐蚀性。
搭建软体机器人磁控实验平台,建立仿尺蠖运动模型,改变磁场方向和大小,以控制尺蠖软体机器人的多自由度形变,通过抗疲劳性能测试以及软体机器人单腿和双腿运动轨迹分析,实现复杂多样化的应用场景。结果表明,EGaIn的添加增强了NdFeB的磁响应度、磁操控性和磁积能,同时提高了仿尺蠖软体机器人的运动速度(48.3mm/s),可靠性和寿命,展现了良好的磁控灵敏度和运动稳定性,为软体机器人发展提供新的思路和方向,有望在军事探测、智能粮仓和生物给药等领域带来新的发展机遇,拓宽软体机器人的应用范围。
机电工程学院高度注重科研团队建设,大力支持教师开展有组织的科研工作。智能传感与集成化检测科研团队致力于智能传感与集成化检测装备、柔性电子与可穿戴设备、生医工程等交叉领域研究,先后获得国家自然科学基金、河南省科技攻关、郑州市科技协同专项等多项课题支持,取得系列研究成果,在国际知名期刊Lab on a Chip、Microsystems & Nanoengineering、Composite Structures、Langmuir、ACS Omega、Biomedical microdevices、Sensors and Actuators A Physical、Micromachines等期刊发表高水平论文20余篇。






{kind=link}